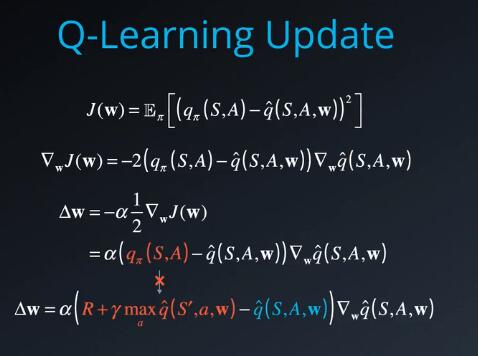
Q学习很容易受到一种联系的影响,Q学习是一种时间差分(TD)学习,这里红色部分:R + y * 下个状态的最大潜在值。称之为TD目标。
我们的目的:是缩小该目标和当前预测Q值(蓝色部分)之间的差异。
蓝色和红色部分的差异就是TD误差,这里的TD目标(红色部分)应该取代的是真值函数qπ(S,A) 。
我们不知道真值函数是什么,我们一开始使用qπ定义平方误差损失

并针对w差分化,以便获得梯度下降更新规则
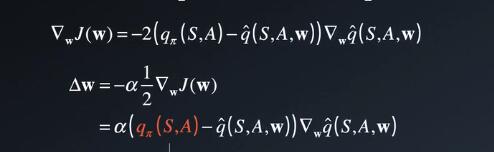
qπ并不依赖于我们的函数逼近器或其参数,因此形成一个简单的导数,即更新规则。但是TD目标依赖于这些参数。因此直接讲真值函数qπ替换成这样的目标,在数学上不成立。
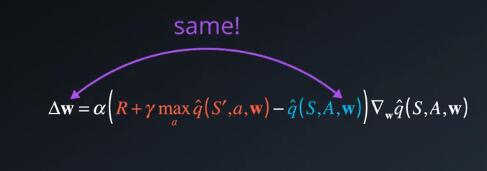
在现实中可以忽略该问题,因为每个更新都会使参数出现小小的变化,我们基本上是朝着正确的方向前进。
下面如果将a设为1,并跳转到目标,那么可能会越过目标,并进入错误区域。此外,如果我们使用查询表或者字典,则不是什么问题,因为每个状态动作对的Q值会单独存储,但是当我们使用函数逼近时,会显著影响到学习效果。因为所有Q值都通过函数参数固定低联系到一起。
你可能会问“经验回放不会解决该问题吗?”,他解决的是有点相似,但稍微不同的问题。对于经验回访,我们通过不按顺序随机的取样元祖,打破了连续经验元祖之间的联系。但有些问题,目标和我们要更改的参数之间有联系
这就像追赶一个移动的目标,你永远追不到,还来回摇摆,并影响到下一个目标位置。
我们要将目标位置和追赶者分开,追赶者块追到目标时,我们再给予下一个目标,而不是
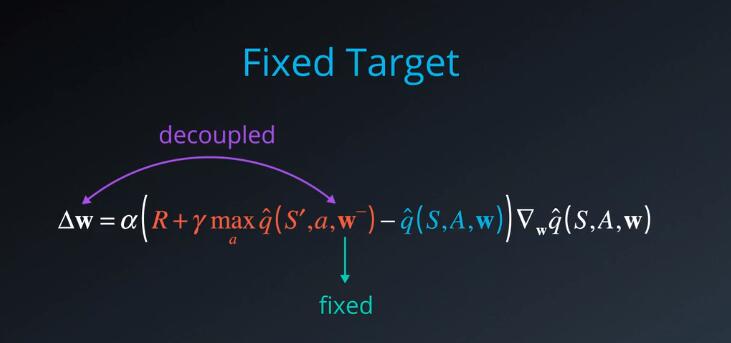
固定Q目标
我们也可以在Q学习中进行几乎一样的操作,将用于生成目标的函数参数固定起来,用w- 表示的固定参数,本质上是在学习过程中不会更改的w副本。在现实中,我们把w替换成w-,用他来生成目标和更改w并持续一定数量的学习步骤,然后使用最新的w更新w-,再次学习一定数量的学习步骤,循环往复。这样就可以使目标和参数拆分开来了,使学习算法更加稳定,并且不太可能会发散或者震荡。