我们来看三个重要的改进:
– 双DQN
– 优先回放
– 对抗网络
双DQN
我们解决的第一个问题是:Q学习容易出现过高估计动作值问题。
我们来回顾一下具有函数逼近的Q学习更新规则,并重点看看TD目标
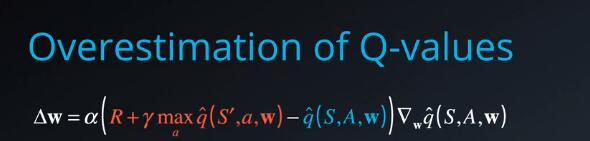
这里的max运算有必要用到,以便计算可以从下个状态获得最佳潜在值,为了更好的理解这一点,我们重写目标并展开max运算。可以更有效的理解为,我们想要获得状态S’的Q值,以及从该状态的所有潜在动作中实现最大Q值的动作
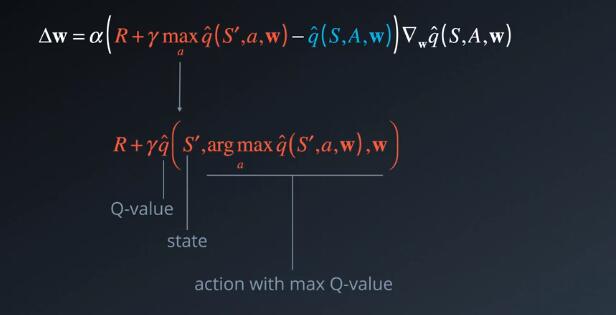
可以看出arg max运算有可能会出错,尤其是在早期阶段。为何?因为Q值依然在变化,我们可能没有收集足够的信息来判断最佳动作是什么,Q值的准确性在很大程度上取决于:尝试了哪些动作以及探索了哪些周围的状态。实际上,事实证明这一部分会导致过高估计Q值,因为我们始终在一组杂乱数字中选择最大值,或许我们不应该盲目的信任这些值。
那么如何才能使我们的估值更加可靠呢?有一个经实践证明效果很好的方法就是双Q学习,我们使用一组参数w,选择最佳动作,但是使用另一组参数w‘,评估动作。相当于有两个单独的函数逼近器,我们必须在最佳动作上达成一致,如果根据W‘ 和W 选择的动作并不是最佳动作,那么返回的Q值不会这么高,长期下来,就可以避免该算法传播偶尔获得的更高奖励,这些奖励并不能反映长期回报。
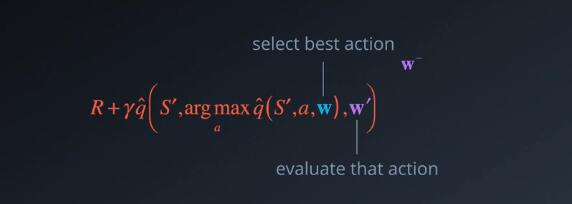
你可能会问,我们从哪获取第二参数呢?从原始的双Q学习公式中,你会保留两个值函数,在每一步随机选择一个函数进行更新,并仅使用另一个评估动作。但是将DQN与固定Q目标结合使用时,我们已经有一组替代的参数。
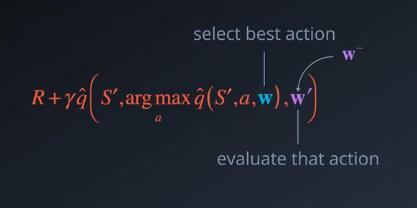
还记得W-吗?实际上,W- 已经保留不用有一段时间了。它与W之间的区别已经足够大,可以重新用于该目的,原理就是这样。这个简单的修改就可以使Q值变起来可靠。防止他们在学习的早期阶段爆发或在后期阶段出现波动。经过证明,形成的策略效果比Vanilla DQN强很多。
优先回放
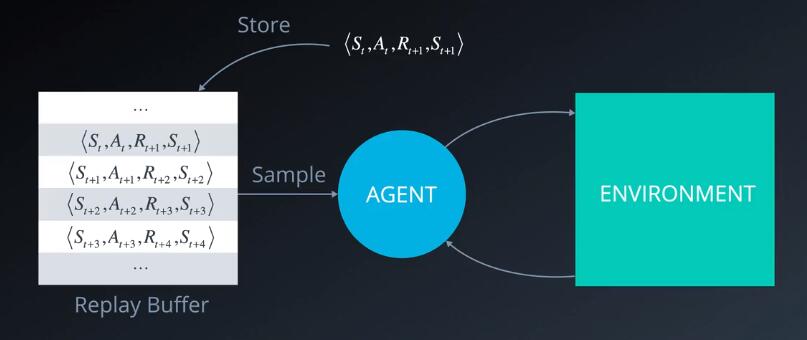
回忆一下经验回放的基本原理,我们与环境互动以便收集经验元祖,将元祖保存在缓冲区,然后随机抽取一个批次从中学习规律。这样有助于打破连续经验之间的关系。并使学习算法稳定下来,到目前为止没有发现什么问题。但是某些经验可能比其他经验更重要,更需要学习。此外,这些重要的经验可能很少发生,如果我们均匀地按照批次抽样,那么这些经验被选中的概率很小,因为缓冲区实际上容量有限。因此更早的重要经验可能会丢失,这时候就要用到优先经验回放了。
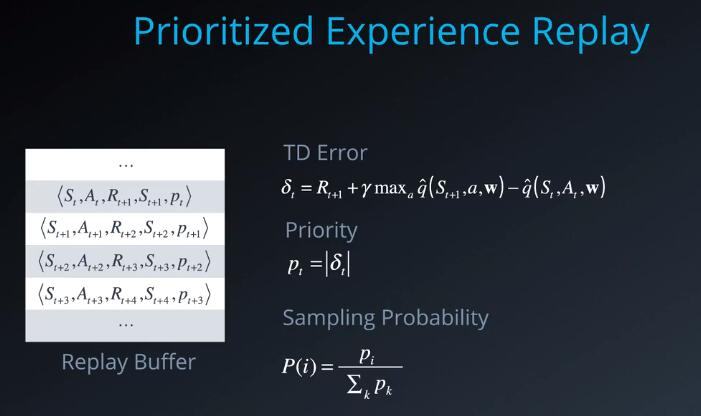
但是我们根据什么条件来为每个元祖分配优先级呢?一种方法是使用TD误差增量,误差越大,我们该元祖中预计学到的规律就越多。我们将此误差的大小作为衡量优先级的条件,并将其与每一个相应的元祖一起存储在回放缓冲区。在创建批次时,我们可以使用该值计算抽样概率。选择任何元祖i的概率等于其优先级值pi,并用回放缓冲区中的所有优先级值之和标准化。选择某个元祖后,我们可以使用最新的Q值,将其优先级更新为新计算的TD误差。似乎效果不错,经过证明,可以减少学习值函数所需的批次更新数量。
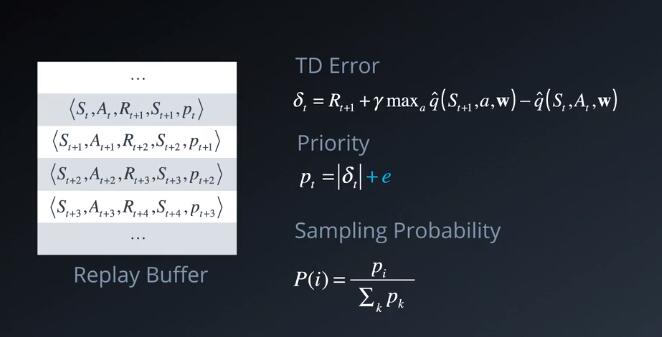
有几个方面可以加以改进。首先,如果TD误差为0,那么该元祖的优先级值及其被选中的概率也为0。
0或者非常低的TD误差,并不一定就表明我们从此类元祖中学不到任何规律,可能是因为到该时间点为止,经历的样本有限。估值很接近真实的值。为了防止此类元祖不被选中,我们可以在每个平衡值后面加上一个很小的常量e
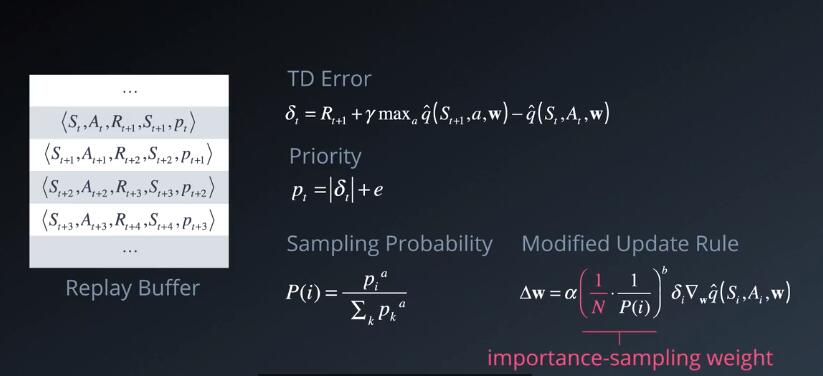
另一个类似的问题是贪婪地使用这些优先级值,可能会导致一小部分经验子集不断被回放,导致对该子集的过拟合。为了避免该问题,我们重新引入一些均匀随机抽样元素,这样会添加另一个超参数a,我们用它将抽样概率重新定义为,优先级pi的a次幂除以所有优先级之和pk,每个都是a次幂,我们可以通过调整该参数,控制采用优先级的随机性的幅度。

a等于0,表示采用完全均匀随机性方法,a等于1,表示仅采用优先级值。当我们使用优先经验回放时,我们需要对更新规则进行一项调整
我们的原始Q学习更新,来自于对所有经验的预期结果,在使用随机性更新规则时,我们对这些经验抽样的方式,必须与来源底层分布匹配。
当我们从回放缓冲区均匀地抽样经验元祖时,能够满足这一前提条件。
但当我们采用非均匀抽样时(例如,使用优先级)时,则不满足该前提条件。我们学习的Q值将因为这些优先级值出现偏差。我们只希望使用这些值进行抽样,为了更正这一偏差,我们需要引入一个重要的抽样权重等于 1/N,N是该回放缓冲区的大小,乘以1/p(i) ,p(i)是抽样概率,我们可以添加另一个超参数b,并将每个重要抽样权重提升为b,控制这些权重对学习的影响程度比这些权重在学习结束是更加重要。这时候Q值开始收敛,因此你可以逐渐将b从很低的值增加到1,这些细节部分可能一开始很难明白,但是每个小小的改进,都可以有效地达到更加稳定高效的学习算法,因此确保仔细阅读优先经验回放论文。
对抗网络
我们将简单介绍最后一个DQN增强技巧,对抗网络。
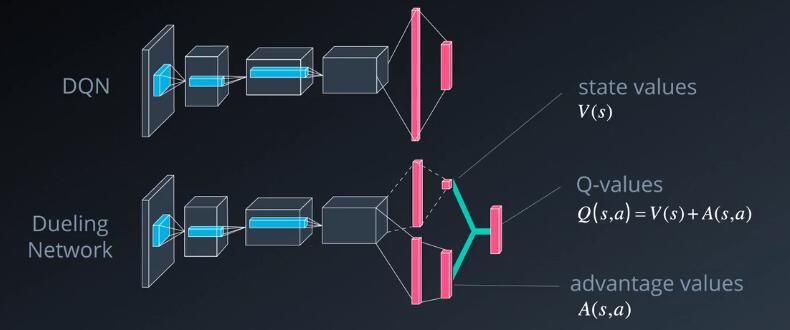
这是一个典型DQN架构,有一系列卷积层,然后是几个完全连接层,生成了Q值,对抗网络的核心概念是使用两个信息流,一个估算状态值函数,一个估值每个动作的优势,两个信息流,可能在一开始具有一些共同的层级。例如,卷积层,然后分支为各自的完全连接层,最后通过结合状态和优势值,获得期望的Q值,这么做的原因是,大部分状态在动作之间变化不大,因此可以尝试直接估算它们,但是我们依然需要捕获动作在每个状态中产生的区别,这时候我们就要用到优势函数,需要进行一些调整,以便将Q学习应用与该框架,你可以在对抗网络论文中找到该调整的方法。和双DQN以及经验回放一样,该技巧显著改善了vanilla DQN。